In September 2010, I first pitched a concept to Cisco for remotely piloted vehicles. This was early–the month before Google announced the first driverless car and before Uber was publicly announced in 2011.
The business case for Better-Drivers–remote piloting of vehicles by qualified operators–was presented at these conferences: (1) 2013 National Rural Intelligent Transportation Systems Conference, St. Cloud, Minnesota; (2) 2013 American Public Transportation Association’s TransITech Conference, Phoenix, Arizona; (3) 2012 Intelligent Transportation Systems World Congress, Vienna, Austria.
Session Video (above) and Presentation (PDF handout download and slide deck, below) from the American Public Transportation Association (APTA) 2013 Fare Collection Workshop & TransITech Conference, Phoenix, Arizona








In 2011 I entered a concept paper in the Connected Vehicle Technology Challenge. There were 80 or so entries; my paper balloted third. The top two balloted papers were from university teams.
BetterDrivers for Remote Control Driving (2011)
by Stephan A. Parker
“Better drivers for a better world.”
In the United States, mobility is freedom. Today, nearly 100 million Americans do not drive. As the population ages, more will lose the ability to drive themselves safely. Without mobility, quality of life declines. Yet public transportation of any type is available in less than 60 percent of counties and taxicabs are available in fewer areas—we need better mobility options for non-drivers.
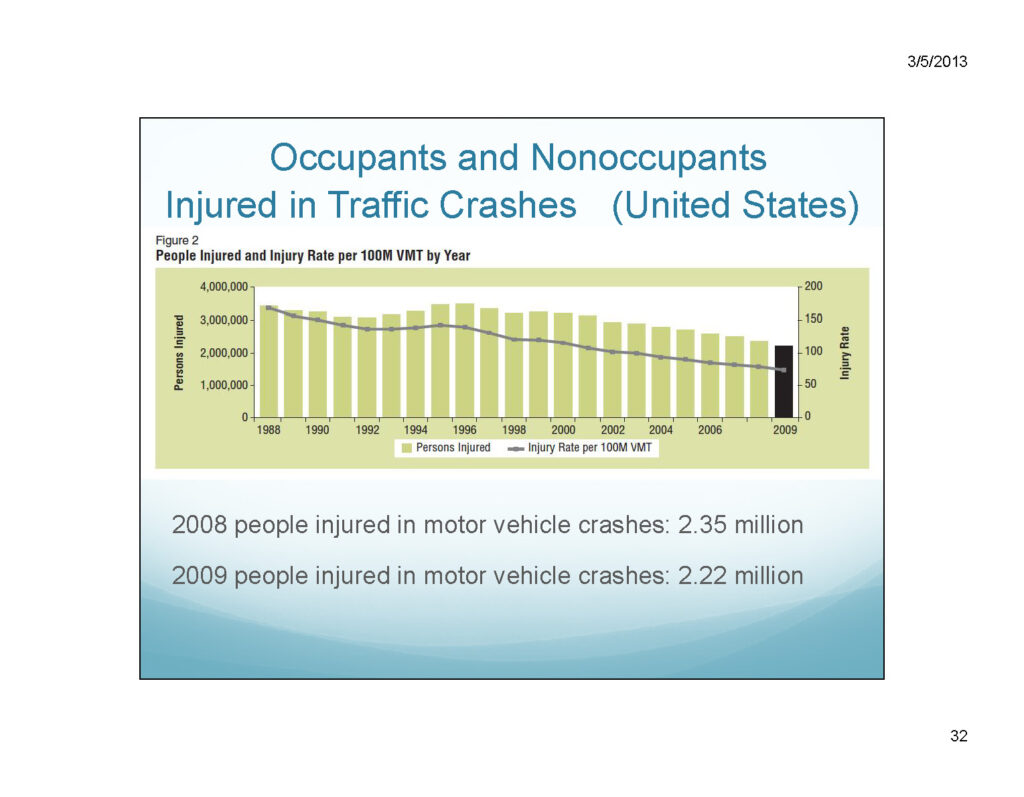
The good news on safety is that injury rates and fatality rates have been lowered through decades of engineering achievements applied to cars and roadways. Now, just as advanced electronics are able to provide additional information to them, drivers are getting more distracted. Engineering improvements to cars and roadways will not be enough—we need better drivers.
Making the local neighborhood more available and safer is what BetterDrivers is all about.
- Mobility is freedom and people are willing to pay for it.
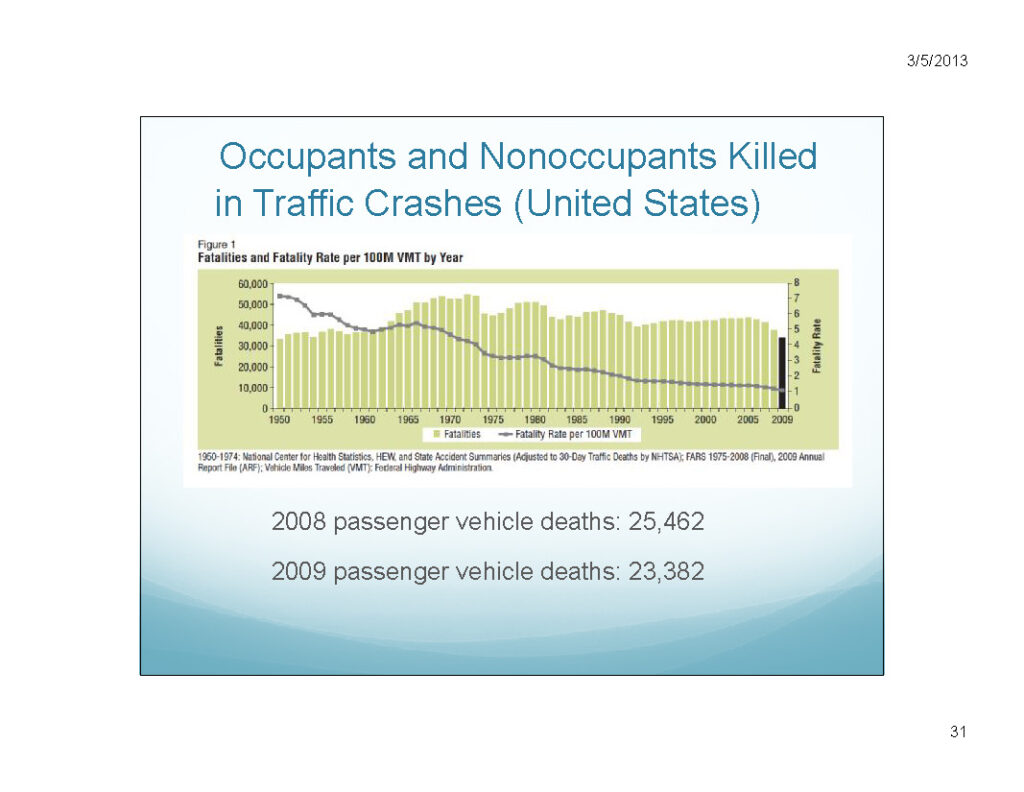
- Thousands of lives can be saved and millions of injuries prevented every year.
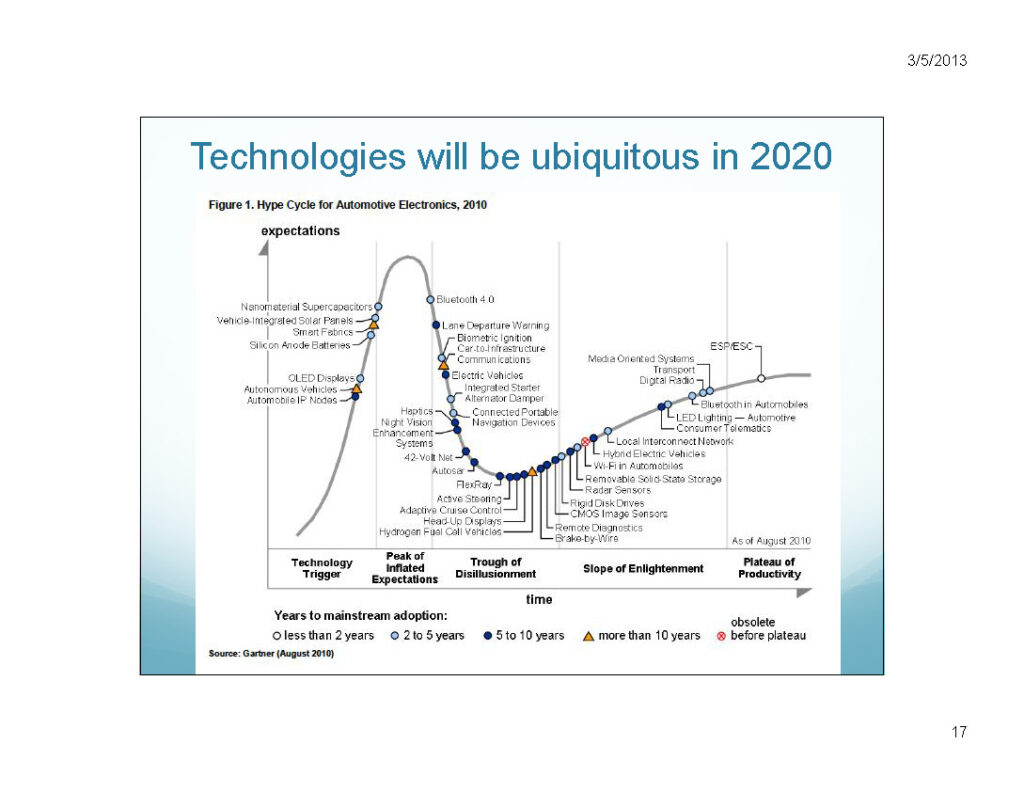
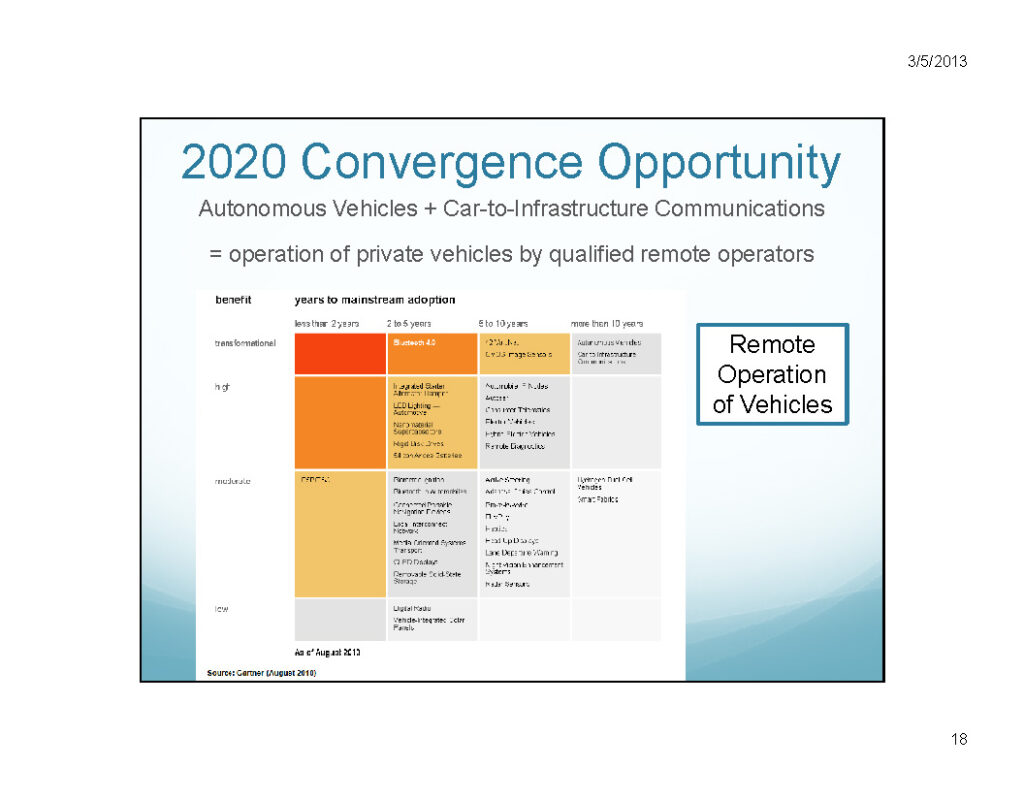
The technology is available to enable remote operation of private vehicles by qualified remote operators!
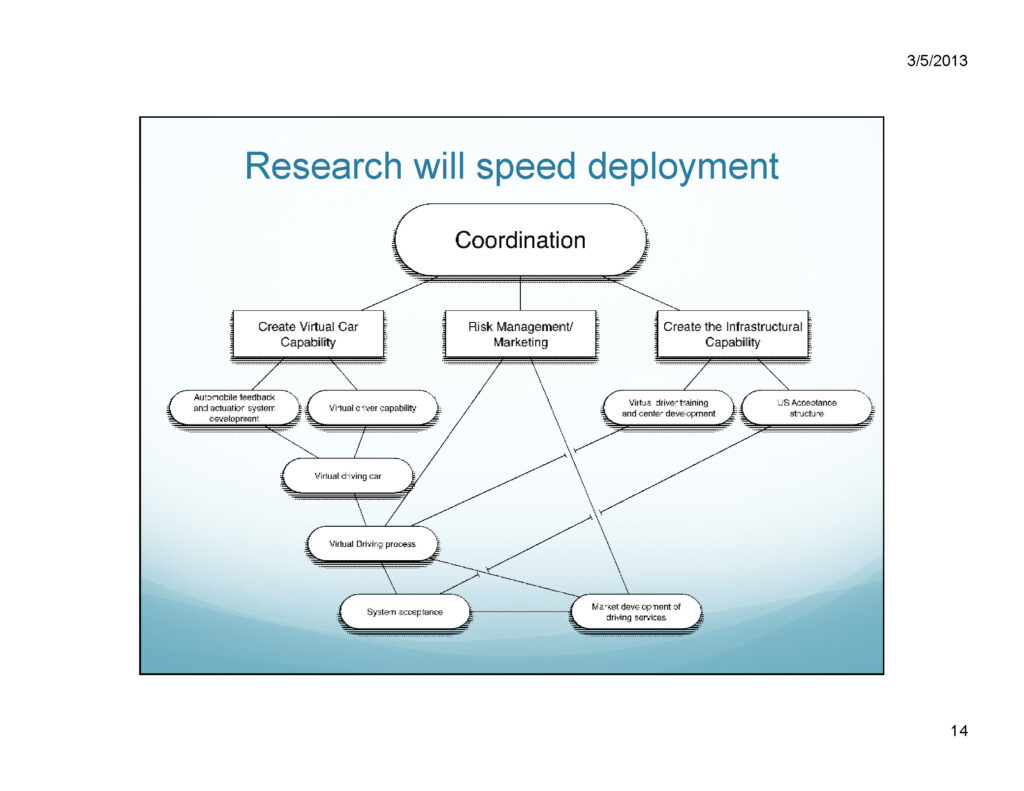
To realize the potential for service delivery, the technology needs to be coordinated with system acceptance and market development of driving services.
Mobility
The BetterDrivers concept—driving services delivered by remote control—provides mobility for (a) millions of baby boomers who do not want to give up their cars, (b) people legally restricted from driving, and (c) people with disabilities. BetterDrivers provides
- transportation on demand that is safe, comfortable, reliable, affordable, and private
- large public benefits by significantly reducing crashes, deaths, and injuries
- merit-based jobs for better drivers
- incentives for millions to improve their driving habits
- client fees that pay for infrastructure
Safety
As autonomous vehicle technologies improve, the workload for a driver (in person or remote) is reduced. Crashes have been reduced 40 percent with current technologies that report fleet drivers for excessive braking, acceleration, or hard turns. Monitoring and controls for remote drivers should yield similar safety results.
Comfort
Most people are more comfortable interacting with a person—especially if there is a problem. BetterDrivers improves autonomous vehicles by providing a certified remote driver. Autonomous vehicles maintain safe operations if communications are interrupted. Remote drivers are certified and have fitness for duty testing before each shift, relief breaks, direct supervision, and multiple communications paths so they can speak with clients and drive cars using Low Earth Orbit satellites, land mobile radio, and Dedicated Short-Range Communications (DSRC).
Implementation
By 2020, baseline technologies for driving by remote control will be mature for (1) autonomous vehicles and (2) vehicle-to-infrastructure communications such as DSRC. Building on research currently underway, such as the Strategic Highway Research Program 2 (SHRP2) Naturalistic Driving Study, companies will develop (a) automobile feedback and actuation systems, (b) the remote control car, (c) remote driver capability, (d) driving metrics, and ultimately (e) the remote control driving process.
Exhibit 1. The BetterDrivers concept integrates the remote control driving process, system acceptance, and market development of remote driving services.
Innovative agreements will be needed for licensing drivers not in a vehicle, law enforcement, and insurance. BetterDrivers could co-locate with a traffic operations center with law enforcement officers on-site, paid for with client fees. Near zero-lag-time can be achieved through DSRC with fiber backhaul to the local BetterDrivers center. A smartphone can be used for the client to speak with the remote driver.
Quality of life
People buy computers with upgrade capability even though most never upgrade; many people will pay extra for the option (in future) of remote control operation of a car. No smelly cabs; no waiting for the driver to show up; no wondering if you need to call the dispatcher. With a remote driver on line, you get to keep your car, keep your stuff and you’re free to come and go as you please. It’s just like driving yourself!
Business
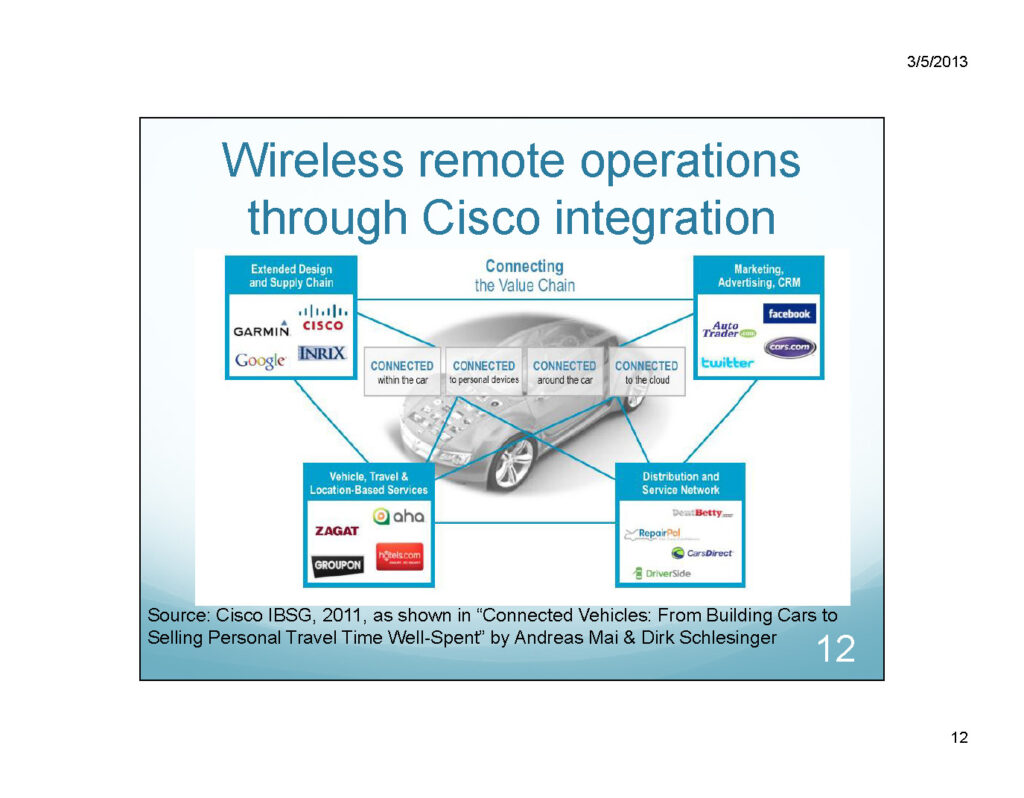
The opportunities for business can be tremendous. Car companies will enhance their images by offering secure communications, command, and control, whether or not the services are ordered. With BetterDrivers services in place, companies can sell cars to millions of people who do not drive. The safety and mobility implications are large, making government cooperation likely. Some car brands already exploit remote operations for marketing. The U.S. market is ready to pay for such technologies.
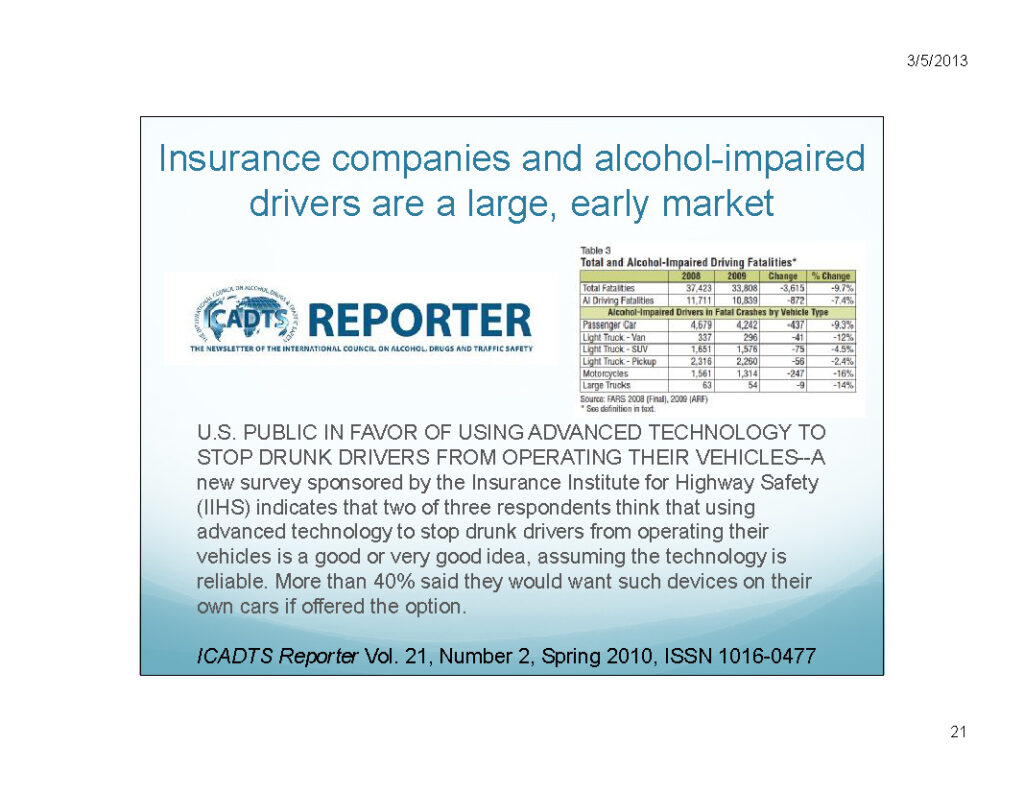
U.S. PUBLIC IN FAVOR OF USING ADVANCED TECHNOLOGY TO STOP DRUNK DRIVERS FROM OPERATING THEIR VEHICLES–A new survey sponsored by the Insurance Institute for Highway Safety (IIHS) indicates that two of three respondents think that using advanced technology to stop drunk drivers from operating their vehicles is a good or very good idea, assuming the technology is reliable. More than 40% said they would want such devices on their own cars if offered the option.
ICADTS Reporter Vol. 21, Number 2, Spring 2010, ISSN 1016-0477
Exhibit 2. Insurance companies and alcohol-impaired drivers are a large, early market.
All current driver-for-hire models apply (taxicab, car service, limousine, jitney, paratransit) with existing care, custody, and control contracting. Business models, visuals, and concepts of operations are readily understood by the public and by regulators. BetterDrivers focuses on the low speed environment, providing mobility near the home. It can be incrementally rolled out from controlled environments to open roads. Eventually, you could use BetterDrivers to drive your parents.
Infrastructure
Whether driven by remote control or autonomously, cars that are “out there” need to be regularly maintained and inspected for safety. Hands-on services can be performed by or copied from car rental companies. To remotely validate the safety of on-road vehicles (in addition to on-vehicle health checks) subscribers and law enforcement could take advantage of DSRC to relay information from automated roadside car safety inspection stations. The inspections could be provided through subscriptions or one-time fees. Remote control and autonomous car safety checks could also be available to manually driven cars, significantly expanding the market. Maintenance and repair shops could support such automated roadside safety inspections and benefit from referrals. A coalition to support the development of such safety infrastructure could be modeled on a current coalition supporting technology and safety initiatives for commercial vehicles (http://www.freightmobility.org/).
Jobs
Online gamers have 10,000 hours of experience by the time they finish high school, according to Dr. Kate McGonigal (http://www.ted.com/talks/view/id/799); she wants to enlist that community to solve big problems (http://www.avantgame.com/).
Through online simulations and games those individuals with superior remote-control driving skills can be identified, recruited, and trained. BetterDrivers labor recruitment and education activities will cause many people to be better drivers.
Earth at Night Credit: C. Mayhew & R. Simmon (NASA/GSFC), NOAA/ NGDC, DMSP Digital Archive Downloaded from http://apod.nasa.gov/apod/ap001127.html
Exhibit 3. BetterDrivers can link labor with wealthy consumer markets within the European Union, India, China, and the United States.
Conclusion: Acceptance
By 2020, baseline technologies for driving by remote control will be mature. Technologies are necessary but not sufficient: policy, legal, and liability issues need to be addressed in order to make it possible not only to have driverless vehicles, but also to have vehicles driven by remote control. Broad acceptance is necessary for significant market penetration, which is key to realizing safety gains. Many more people will be willing to ride in autonomous vehicles if they have a person on the line with them, making sure their journey is safe and secure. The BetterDrivers concept—driving services delivered by remote control—provides jobs and mobility by integrating the remote control driving process, system acceptance, and market development of driving services.
Background materials
Remote controls:
2010 Mitsubishi Live Drive http://www.youtube.com/watch?v=tAeJJQvrcRw
2011 Chevrolet Cruze | Remote Control http://www.youtube.com/watch?v=eHruySdTarE
2012 Ford Focus: Active Park Assist http://www.youtube.com/watch?v=m8IdUU-3m8A
Autonomous vehicles:
INRIA-Cybercars and the city of the future http://www.youtube.com/watch?v=Ns896Thb9oY
CityMobil – Towards Advanced Road Transport for the Urban Environment http://www.citymobil-project.eu/site/en/Movies%20and%20films.php
Driving behavior:
FloChat – Introducing Snapshot! http://www.youtube.com/watch?v=ggWY7OPag0s&feature=player_embedded
Introduction to DriveCam
http://www.drivecam.com/resource-center/video-center/informational-videos
A Current Transportation Infrastructure Coalition
“The Trucking Industry Mobility & Technology Coalition (TIMTC) is jointly managed by the American Transportation Research Institute (ATRI), the Commercial Vehicle Safety Alliance (CVSA), the American Association of State Highway and Transportation Officials (AASHTO), the U.S. Department of Transportation (U.S. DOT) and the American Trucking Associations (ATA). The TIMTC is sponsored by the U.S. DOT. Members include motor carriers, commercial drivers, law enforcement, technology providers, equipment manufacturers, transportation planners and policy makers at the local, state and federal levels.” http://www.freightmobility.org/
More on the SHRP 2 Naturalistic Driving Study (emphasis added)
“SHRP 2 Report S2-S05-RR-1: Design of the In-Vehicle Driving Behavior and Crash Risk Study provides a summary of the key aspects of the planning effort supporting the SHRP 2 Naturalistic Driving Study (NDS). SHRP 2 Safety Project S05: Design of the In-Vehicle Driving Behavior and Crash Risk Study (Study Design) designed the SHRP 2 NDS, which will collect data—on the order of 1 petabyte (1,000 terabytes)—on “naturalistic,” or real-world, driving behavior over a 2-year period beginning in fall 2010. The resulting data will provide a wealth of information regarding driving behavior, lane departures, and intersection activities, which is anticipated to be of interest to transportation safety researchers and others for at least 20 years. The report is available online as an Adobe PDF document and in hardcopy through the TRB bookstore.”
“The objective of the SHRP 2 NDS is to reduce traffic injuries and fatalities by finding ways to prevent collisions and reduce their severity. Every 1% reduction in crashes will prevent 330 deaths and about $2 billion annually in medical expenses and other losses from these crashes. Moreover, crashes are a leading cause of nonrecurring congestion. Collision prevention has added benefits in terms of reduced delay, fuel consumption, and emissions. The focus of the NDS is to provide objective information on the role of driver behavior and performance in traffic collisions and the interrelationship of the driver with vehicle, roadway, and environmental factors…Using a sophisticated recording package installed in vehicles, it will collect information on the day-to-day driving of about 3,100 volunteer drivers for up to 2 years.” http://books.trbbookstore.org/s2s05.aspx
CITYMOBIL, La Rochelle, France (2011)

I hand-carried copies of my “Better-Drivers for Remote Control Driving” paper to the wrap-up conference for the CITYMOBIL research program. Program participants told me the Better-Drivers concept was sound, but no one would be willing to bet on it until they could see a demonstration project.
In La Rochelle I had the privilege of riding in the first automated vehicle to operate in mixed traffic. See photo above, from the local paper.
https://www.sudouest.fr/economie/transports/la-rochelle-teste-l-auto-sans-chauffeur-9657451.php



2012 Intelligent Transportation Systems World Congress, Vienna, Austria
My bosses at the Transportation Research Board (TRB) authorized me to present at the 2012 ITS World Congress. They even paid my registration fee! I was thrilled to be the first speaker at the session “Innovative Multi-modal Mobility.”






2013 Intelligent Transportation Systems World Congress, Tokyo, Japan (paper withdrawn after acceptance)
My bosses at the Transportation Research Board (TRB) did not authorize me to present at the 2013 ITS World Congress. As my co-authors could not travel to present, either, we had to withdraw the paper. The draft is below.
The Future of Transit is Here: Rides on Demand Can Be Better Than (and Almost as Fast as) Driving Yourself
Stephan A. Parker
Senior Program Officer, Transportation Research Board of the National Academies
500 Fifth Street NW, Washington, DC 20001 USA
TEL 202-334-2554, FAX 202-334-2006 saparker@nas.edu; BetterDrivers@icloud.com
Lawrence J. Harman
Co-Director, GeoGraphics Laboratory,
Conant Science and Mathematic Center
Bridgewater State University
Bridgewater, MA, 02325 TEL 508-531-6144 larry@geographicslab.org
Nanda Srinivasan
Senior Program Officer, Transportation Research Board of the National Academies
500 Fifth Street NW, Washington, DC 20001 USA
TEL 202-334-1896, FAX 202-334-2006 nsrinivasan@nas.edu
ABSTRACT
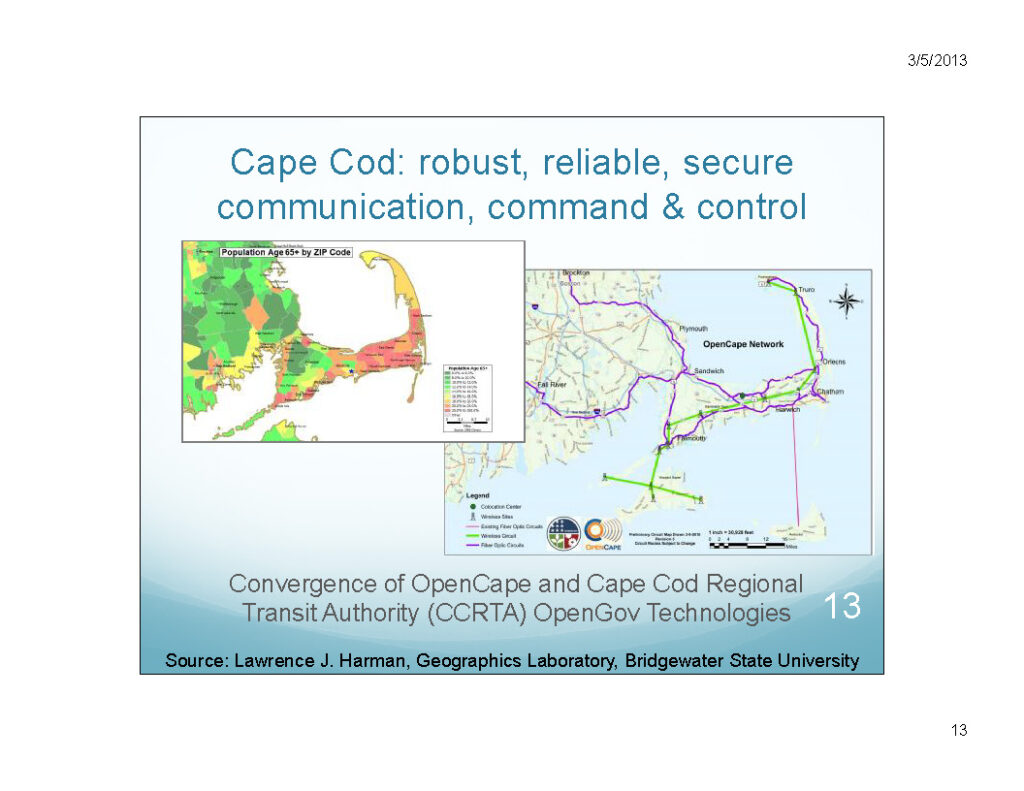
For years, people in public transportation have focused on how to get people out of their cars in order to make transit efficient. Changes in people’s attitudes and available technologies have recently begun to make markets respond to the enormous latent demand for mobility. Here is the future of transit: expanding mobility through entrepreneurial services that blend the best aspects of public and private transportation services. New service models, new vehicles, and new infrastructure are now in place to allow revolutionary improvements in productivity. An innovative research and demonstration project sponsored by the Cape Cod Commission and the Cape Cod Regional Transit Authority is integrating service models, technologies, communications infrastructure, and qualified operators to provide rides by remote control, a concept called Better-Drivers. The expected result: better mobility and many new jobs.
Keywords: autonomous vehicles, car sharing, transit on demand, remote operation, jobs
1. INTRODUCTION
For years, people in public transportation have focused on how to get people out of their cars in order to create demand densities that will make transit efficient. With recent changes in people’s attitudes and available technologies, markets are responding in innovative ways to satisfice the latent demand for mobility. Here is the future of transit: expanding mobility through entrepreneurial services that blend the best aspects of public and private transportation services. New service models, new vehicles, and new infrastructure allow revolutionary improvements in transit productivity by effectively eliminating deadheading. Rather than resulting in fewer jobs, moreover, the ability to provide rides on demand without waiting time for a driver to physically get to your location is expected to create thousands of good jobs—in the locales that will allow the remote driving control technologies to be installed. There is a need for independent research to inform the policy makers so as to foster and reward innovation. To some extent, this will require swimming against the tide of open systems, as—for the sake of both operational security and technology investment amortization—it will be more efficient and effective to support proprietary systems that permit open data exchange (ODE).
1.1 Vehicles
Recently, new vehicles and manufacturers have introduced advances in control technologies and marketing specifically to people with mobility challenges. In August 2012, the Chinese firm BYD put the Su Rui model on the market in Beijing, the first commercially available passenger vehicle with Remote Driving Control technology. The media were quick to realize that it is only a matter of time before the remote controls are hacked to remove the speed and range limiters (the remote control is intended to cap the speed at 2 kilometers per hour and the range at 20 meters in order to limit use of the technology to parking where there is not room to open the driver’s door). http://www.byd.com/news/news-117.html
January 2013 brought announcements by Toyota and Audi. As noted in Toyota’s news release:
While key components of these research efforts could lead to a fully autonomous car in the future, the vision is not necessarily a car that drives itself. Instead, Toyota and Lexus envision technologies that enhance the skills of the driver, believing a more skillful driver is a safer driver.
“In our pursuit of developing more advanced automated technologies, we believe the driver must be fully engaged,” said Mark Templin, Toyota group vice president and general manager of the Lexus Division. “For Toyota and Lexus, a driverless car is just a part of the story. Our vision is a car equipped with an intelligent, always-attentive co-pilot whose skills contribute to safer driving.”
The Lexus advanced active safety research vehicle is equipped with an array of sensors and automated control systems to observe, process and respond to the vehicle’s surroundings. These include GPS, stereo cameras, radar and Light Detection and Ranging (LIDAR) laser tracking.
Similarly, Audi’s news release also stops short of fully autonomous operation:
Today, Audi defines autonomous driving capabilities in terms of piloted parking and piloted driving. The term “piloted” is used advisedly, as Audi envisions motorists enjoying the convenience of allowing the car to handle mundane stop-and-go driving conditions, for example, while still being able to take control of the car when needed. In this way, the technology is similar to auto-pilot systems found on jetliners. Likewise, autonomous, or piloted parking, would let future Audi models park safely without a driver at the wheel in tight parking spaces.
As the technologies that support a driver get more robust and require less driver attention, the temptation for the driver to pay less attention to the driving task and more attention to, say, entertainment and communications technology, could potentially confound the safety advances that these driver assistance technologies present. There is a solution for that.
1.2 Services
Car-sharing services have spread widely, but mobility for the entire mobile population requires more than just vehicles; drivers are needed, too. Examples of these innovations spreading from concepts to implementation can be found in the marketplace already. For example:
AutoPilot, whose slogan is “Your car. Our driver. On demand.” http://www.myautopilot.co/pages/join
Lyft, which is marketed with the slogan “Your friend with a car, on demand.” http://lyft.me/safety
The first of these services depends on having drivers in close enough proximity to the demand, which implies density requirements; the latter requires overlapping density of drivers and demand. Both are innovative and market-responsive. There is, however, a gap in the market that can be filled using these types of service models in a mash-up with demand-responsive public transportation.
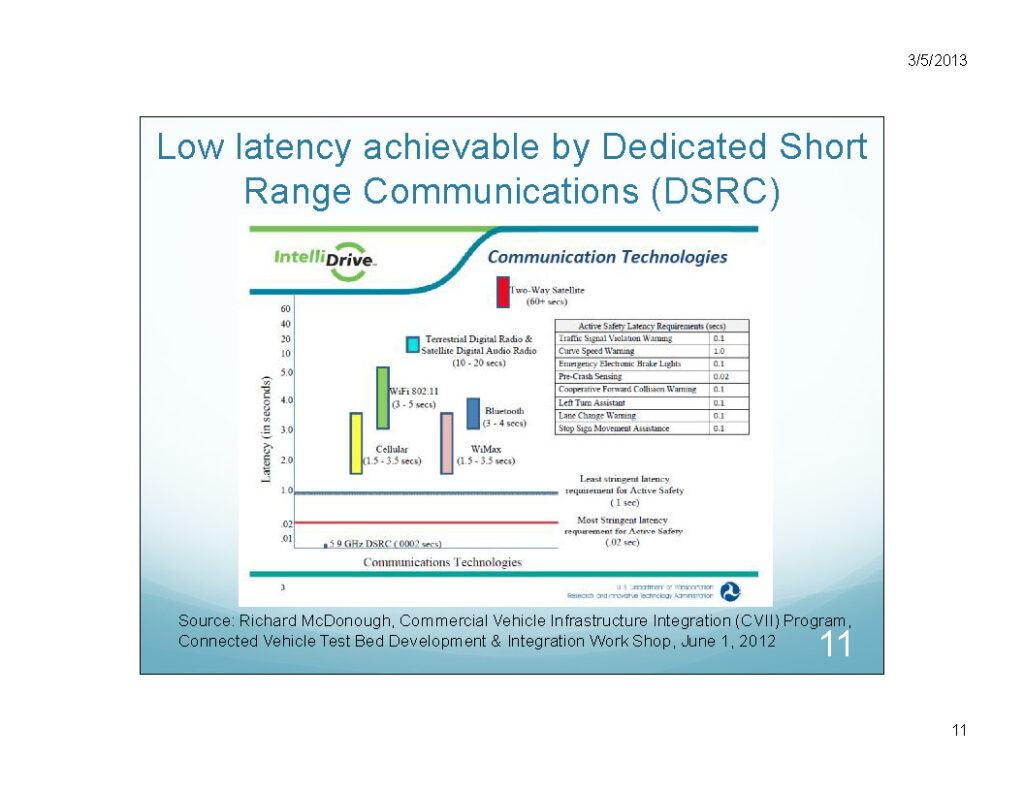
1.3 High-speed communications technology
It is possible to get the necessary low-latency today by employing DSRC with fiber backhaul. It is anticipated that sufficiently low latency can also be achieved using 4G LTE, which is likely to leverage the security and back-office billing infrastructure of traditional wireless telecommunications companies.
4G LTE capabilities include:
- Downlink peak data rates up to 326 Mbps with 20 MHz bandwidth
- Uplink peak data rates up to 86.4 Mbps with 20 MHz bandwidth
- Operation in both TDD and FDD modes
- Scalable bandwidth up to 20 MHz, covering 1.4 MHz, 3 MHz, 5 MHz, 10 MHz, 15 MHz, and 20 MHz in the study phase
- Increased spectral efficiency over Release 6 HSPA by two to four times
- Reduced latency, up to 10 milliseconds (ms) round-trip times between user equipment and the base station, and to less than 100 ms transition times from inactive to active
http://www.4gamericas.org/index.cfm?fuseaction=page§ionid=249
1.4 Integrated service models leverage communications technologies to remotely pilot vehicles
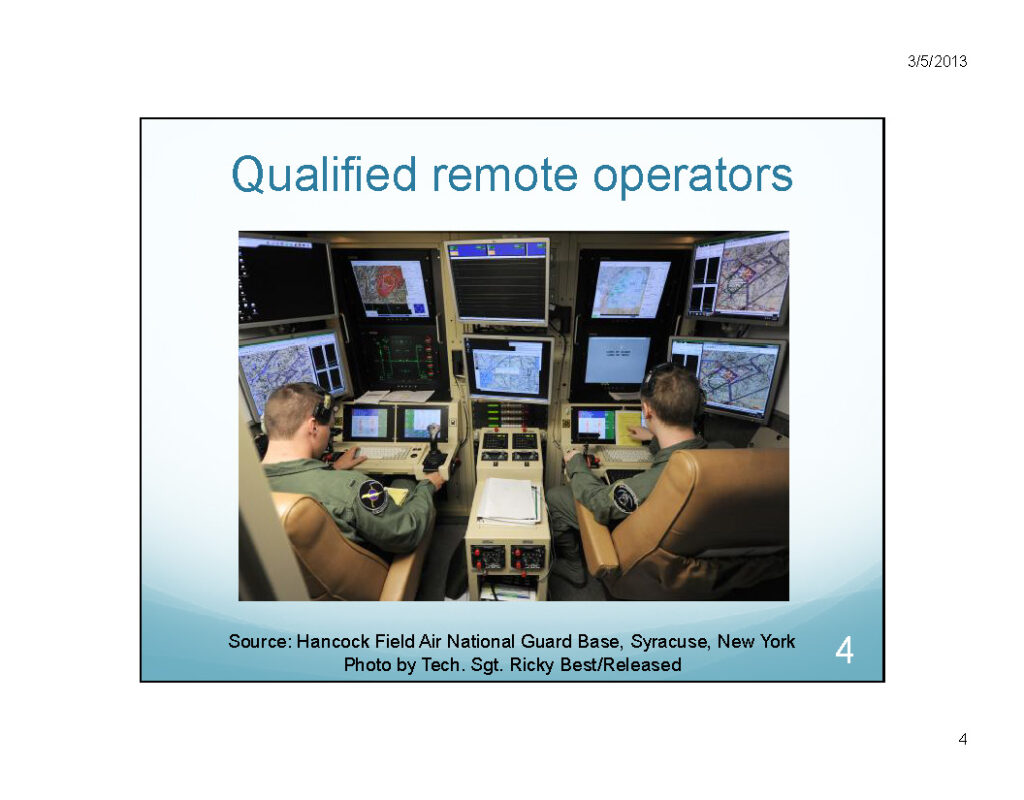
The Cape Cod Commission and the Cape Cod Regional Transit Authority are leveraging high-bandwidth fiber and dedicated high-bandwidth radio infrastructure installed for the OpenCape Broadband initiative to test the feasibility of remotely driving cars, a concept known as Better-Drivers. Using the model of drone pilots, who remotely pilot planes, and low-latency telecommunications through either (a) dedicated short-range communications (DSRC) with fiber backhaul or (b) 4G long term evolution (LTE) cell technology, qualified drivers in a call center can provide instant driving services to persons wishing such assistance. This will make the service delivery as seamless to riders as the one-call, one-click service request concept.
2. ACKNOWLEDGMENTS
The American Public Transportation Association and its Research and Technology Committee provided early vetting of the concepts in this paper. The Cape Cod Commission and the Cape Cod Regional Transit Authority are funding Bridgewater State University’s current research and development of systems engineering to test the feasibility of using remote drivers to provide rides on demand on the lower Cape.
About
From 2000 to 2023, Stephan A. Parker managed public transportation, pedestrian, and bicyclist projects as well as projects in the surface transportation resilience-, security-, emergency management-, and critical infrastructure protection-related research efforts in the Cooperative Research Programs at the Transportation Research Board (TRB) of The National Academies, coordinating technical panels and contractors to produce dozens of reports.
Prior to joining TRB in 2000, Mr. Parker developed Intelligent Transportation Systems courses and ran the NTI Fellows program for the Advanced Technologies and Innovative Practices section at the National Transit Institute at Rutgers, The State University of New Jersey. He earned a BS in Speech from Northwestern University and an MS in Interdisciplinary Studies: Civil Engineering and Management of Technology from Vanderbilt University. Mr. Parker is author of An Assessment of U.S. Hazardous Materials Emergency Response Preparedness (MS thesis, Vanderbilt University, 1994) and co-author of Technical and Sociopolitical Issues in Radioactive Waste Disposal, 1986 (The Royal Swedish Academy of Sciences, 1987). He served as Scholar Associate for a Review of the Department of Homeland Security’s Approach to Risk Analysis (National Academy of Sciences, 2010).
Mr. Parker began his transportation career as a bus driver. As the Administrator for the Joint Powers Transportation Board of the Town of Jackson and Teton County, he served as the general manager for the START Bus transit system in Jackson Hole, Wyoming, and was founding vice-president of WYTRANS, the Wyoming Public Transit Association.
In 2010, Mr. Parker began developing the business case for Better-Drivers–remote piloting of vehicles by qualified operators. Relevant presentations: (1) 2013 National Rural Intelligent Transportation Systems Conference, St. Cloud, Minnesota; (2) 2013 American Public Transportation Association’s TransITech Conference, Phoenix, Arizona; (3) 2012 Intelligent Transportation Systems World Congress, Vienna, Austria.
Steph produced comedy revues in Jackson Hole from 1988 to 1992 for the Roadkill on a Stick Frozen Foods Theatre Company. He co-produced a studio album – A Roadkill Opera – in 2013. In 2016, he produced four fully staged performances with a chamber orchestra and two fully staged performances with the Symphony Orchestra of Northern Virginia.
October 2024 saw the release of a two-disc 180-gram vinyl gatefold LP.
Roadkill!!! Greatest Hits! A Roadkill Opera Movie was released on YouTube in August 2025.